2022 Robothon – New Dexterity
The Solution – An Adaptive Robot Arm Gripper System
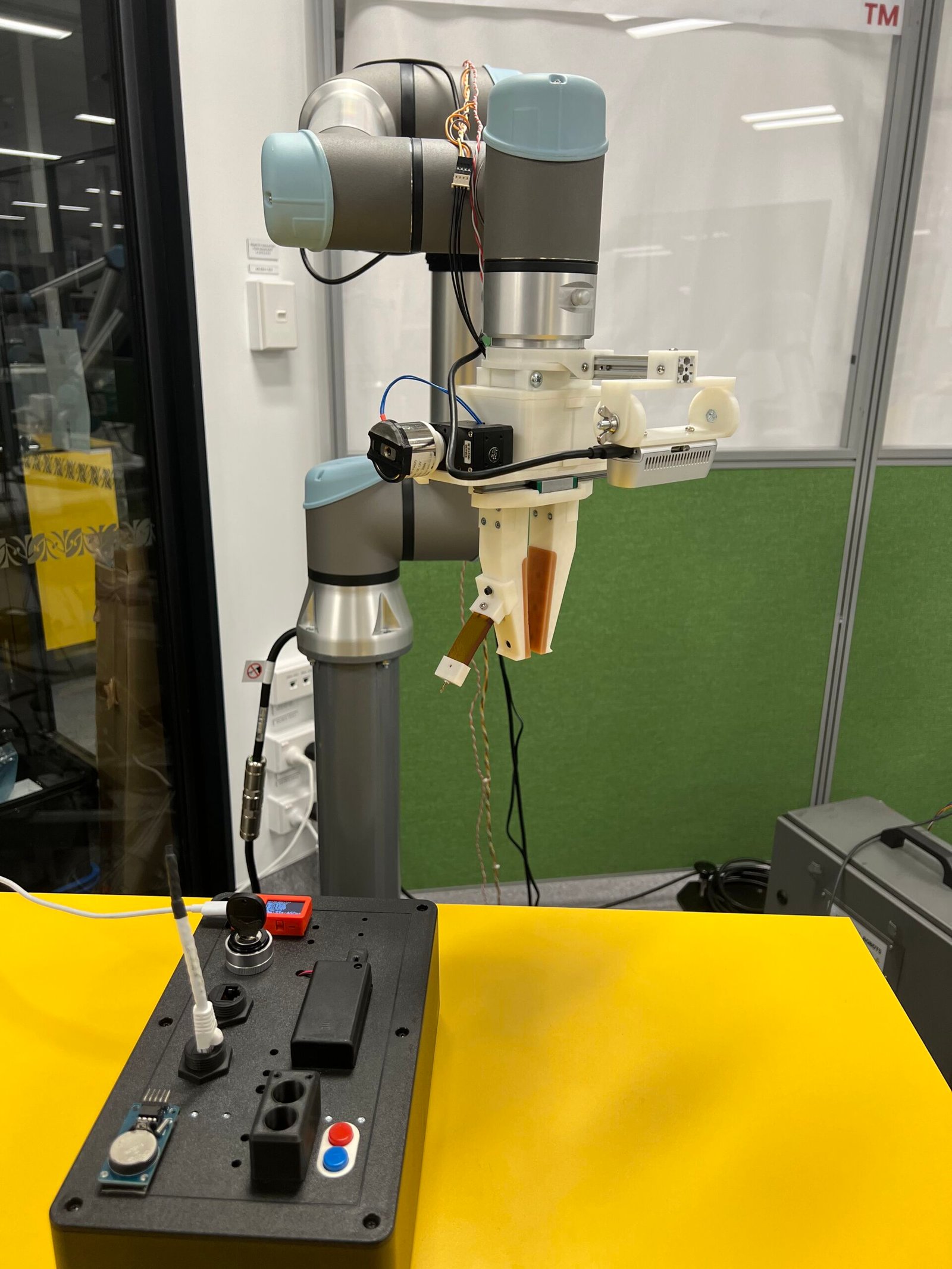
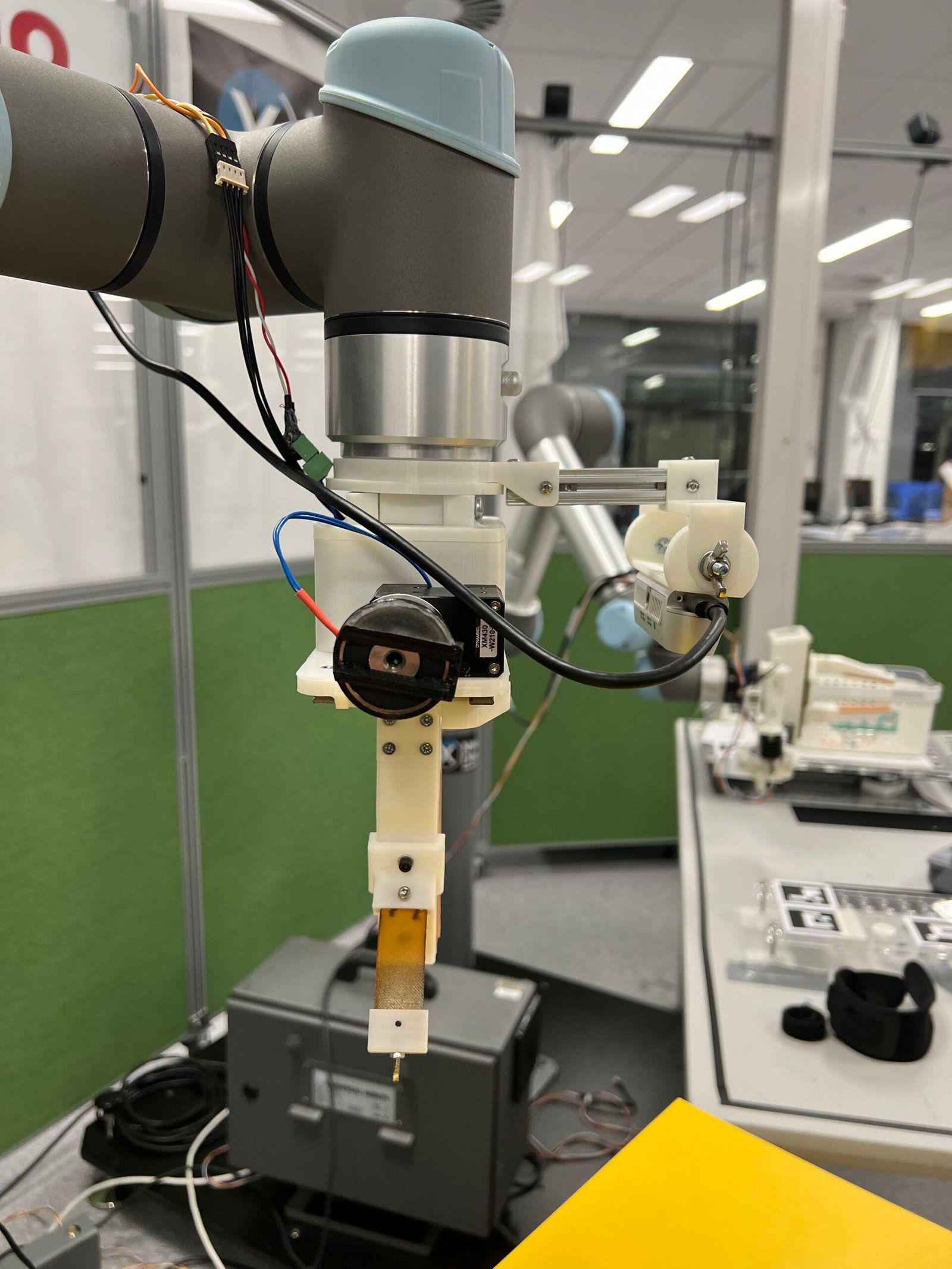
For the 2022 Robothon Grand Challenge the New Dexterity team uses a robot arm gripper system that consists of a Universal Robots UR5e robotic arm and a custom, adaptive parallel-jaw gripper. The gripper has been designed and developed by the New Dexterity research group and it is equipped with: i) a compliant tool that facilitates the coin battery extraction and ii) a rotary module that combines an elastic pad and an electromagnet for the extraction of the AA batteries from the battery box. The robot arm gripper system is depicted in the following images. The robot arm end-effector is equipped with a torque sensor and an Intel RealSense D435 camera that is used for robotic perception purposes. More details about the New Dexterity solution can be found in our GitHub repository at the following URL: https://github.com/newdexterity/Robothon2022