
Research Areas
Our research focuses on the following areas and topics.

THIS PART OF THE WEBSITE IS OUTDATED.
FOR AN UPDATED LIST OF OUR PROJECTS PLEASE CHECK THE LATEST VIDEOS
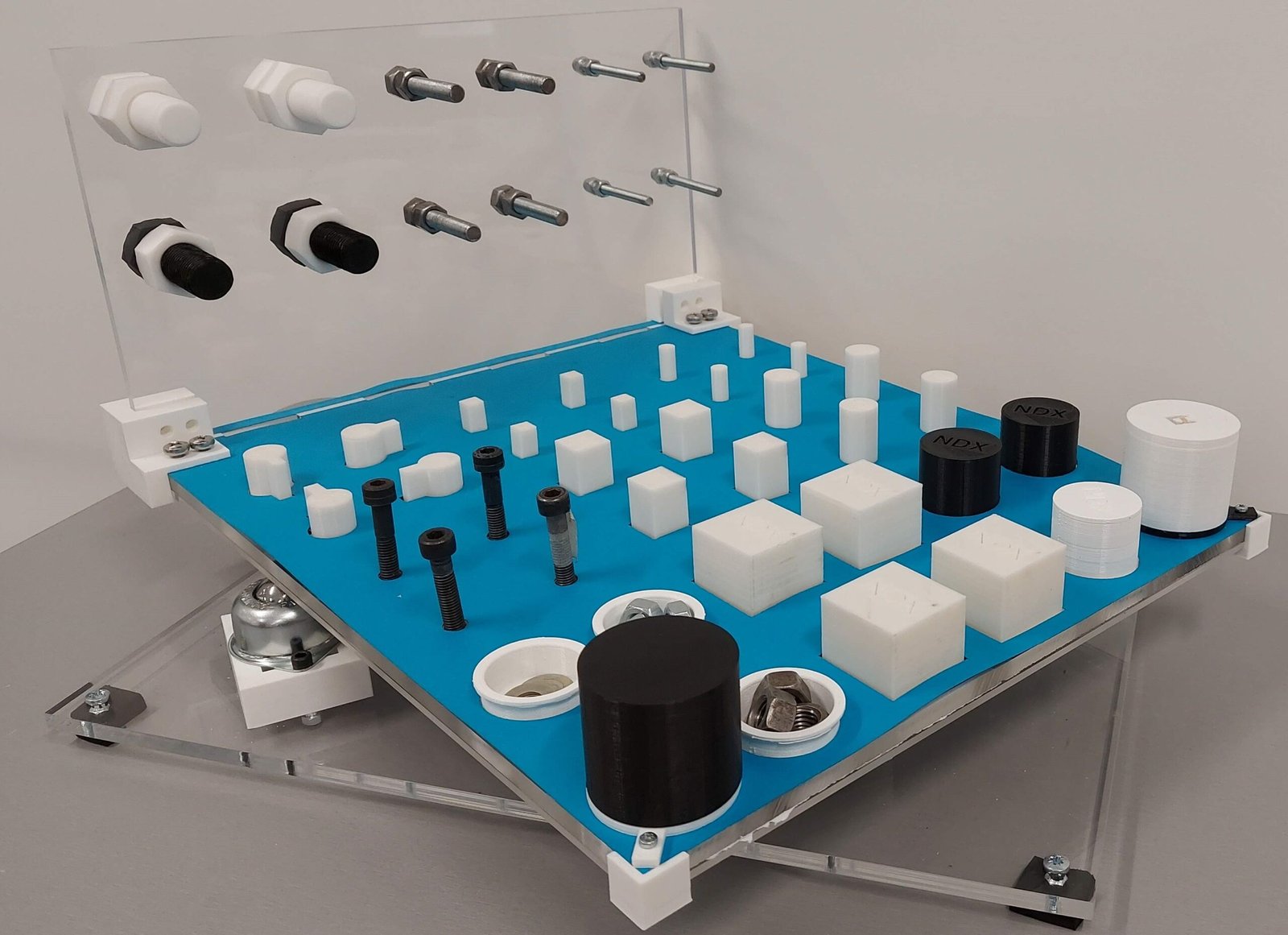
An Open-Source Dexterity Test

Adaptive Exoskeleton Gloves
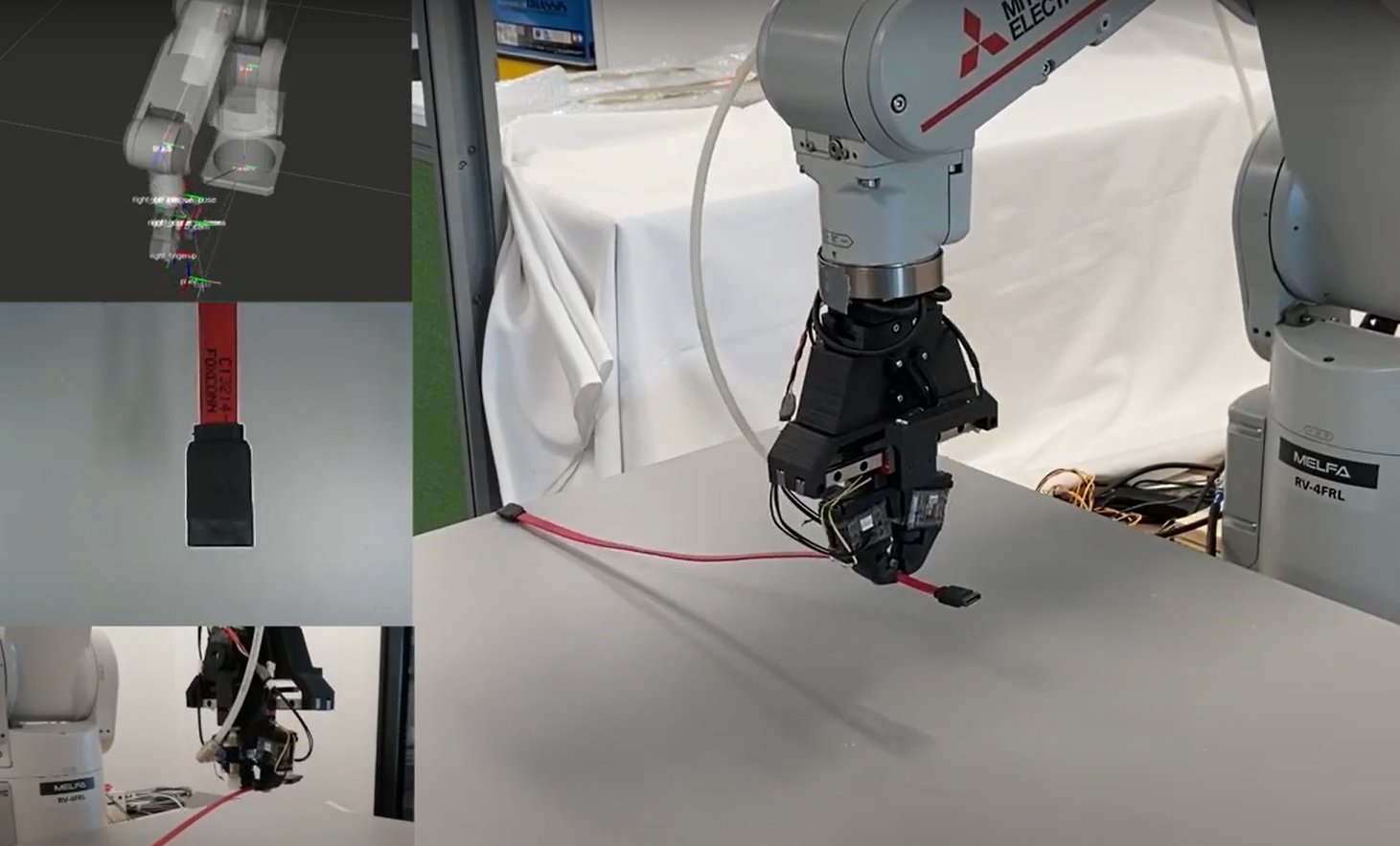
Flexible Cable Manipulation Gripper

Ultra Fast Aerial Grasping & Perching

Affordances Based Telemanipulation

The NDX-A Adaptive Robot Hand